Unsere beiden früheren Roboter: Sinus und Cosinus
Sinus und Cosinus für die Saison 2014 und 2015 - Rescue Line Primary
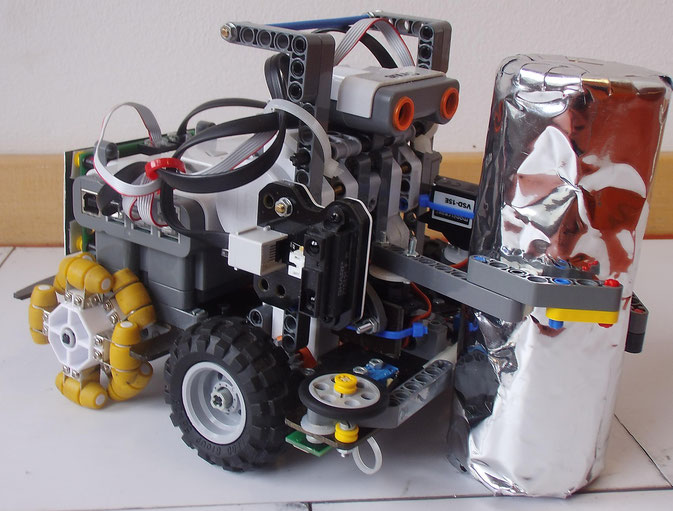
Unsere beiden Roboter Sinus und Cosinus sind aufgebaut auf der
"Grundplatte", einer per CNC-Maschine gefrästen Platte aus Hartpapier. Darauf sitzen zwei Lego-NXT-Motoren, die mit dem Getriebe auf der Unterseite verbunden sind, dahinter sitzt der NXT-Brick. An der Unterseite vor dem Getriebe ist eine selbstdesignte Platine mit 6 Lichtsensoren befestigt, darüber die beiden Taster. Über den Motoren befindet sich der Ultraschallsensor. An der Seite sitzt der Infrarotsensor für die Opfersuche, für die auch die beiden Servomotoren mit den Greifern an der Vorderseite mit den Motoren verschraubt sind. Die Lichtsensorplatine, die beiden Taster und beiden Servomotoren sind mit der sogennanten "SuperMux" verbunden, die mit dem Wattunio-Pro-mini-v10 Prozessor als Multiplexer sowie als Zweitprozessor fungiert und mit dem NXT-Brick via RS485 kommuniziert.